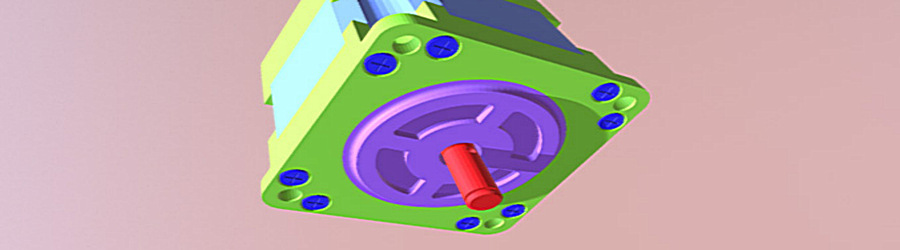
 Priemyselné roboty majú zvyčajne pohon elektrickým motorom. Takýto motor pracuje pri vysokých otáčkach a pre pohon robotov potrebujeme sprevodovať výstupný pohyb s vysokým prevodovým číslom. Na tento účel sú zvlášť vhodné harmonické prevodovka. Model predstavuje vonkajší vzhľad firemnej harmonickej prevodovka.
Priemyselné roboty majú zvyčajne pohon elektrickým motorom. Takýto motor pracuje pri vysokých otáčkach a pre pohon robotov potrebujeme sprevodovať výstupný pohyb s vysokým prevodovým číslom. Na tento účel sú zvlášť vhodné harmonické prevodovka. Model predstavuje vonkajší vzhľad firemnej harmonickej prevodovka.
Princíp je vyobrazený na 3D animovanom modely (Pre aktiváciu 3D vlastností kliknite na "Čítať ďalej" ...
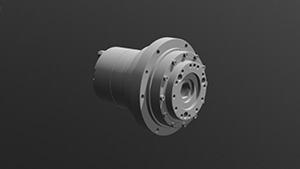
 Ďalšie firemné prevedenie pohonu pre priemyselný robot s označením 70-000tb-0154.
Ďalšie firemné prevedenie pohonu pre priemyselný robot s označením 70-000tb-0154. 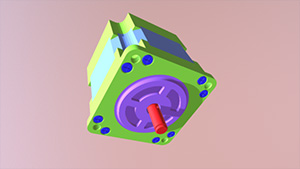 Krokový elektrický motor dostáva impulzy na vykonanie pohybu.Každý impulz znamená vykonanie jedného kroku. Krok je najmenšia možná časť dráhy. Počet impulzov dáva veľkosť prejdenej dráhy. Rýchlosť ich toku udáva rýchlos´t dráhy
Krokový elektrický motor dostáva impulzy na vykonanie pohybu.Každý impulz znamená vykonanie jedného kroku. Krok je najmenšia možná časť dráhy. Počet impulzov dáva veľkosť prejdenej dráhy. Rýchlosť ich toku udáva rýchlos´t dráhy 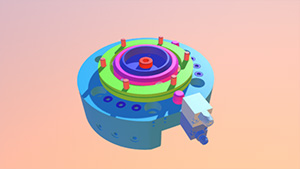 Pneumatické pohony vynikajú jednoduchosťou konštrukcie, ale majú problém s riadením.
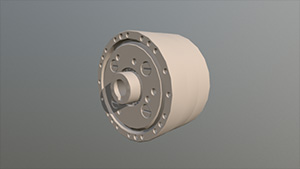
Pneumatické pohony vynikajú jednoduchosťou konštrukcie, ale majú problém s riadením. 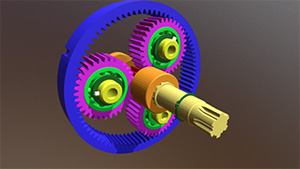 Pohyb vykonávaný motormi je zvyčajne rýchly preto je potrebné vložiť medzi motor a koncový člen prevodový mechanizmus. Veľmi často sa používa planetová prevodovka, ktorej princíp je na 3D modely.
Pohyb vykonávaný motormi je zvyčajne rýchly preto je potrebné vložiť medzi motor a koncový člen prevodový mechanizmus. Veľmi často sa používa planetová prevodovka, ktorej princíp je na 3D modely.